Adaptive graph exploration
Training neighborhoods are refreshed online instead of being fixed before optimization.
ICLR 2026 Conference Paper
SAGE learns efficient Visual Place Recognition (VPR) through dynamic geo-visual graph exploration, hard neighborhood mining, and lightweight parameter-efficient adaptation on a frozen DINOv2 backbone.
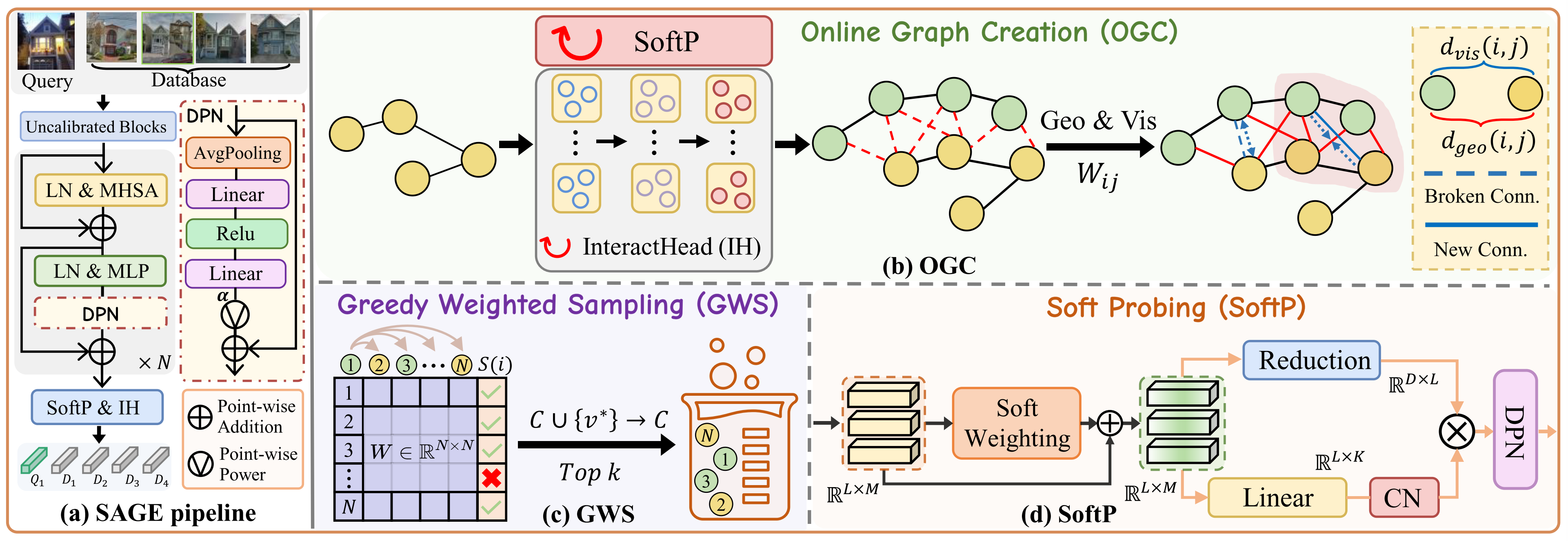
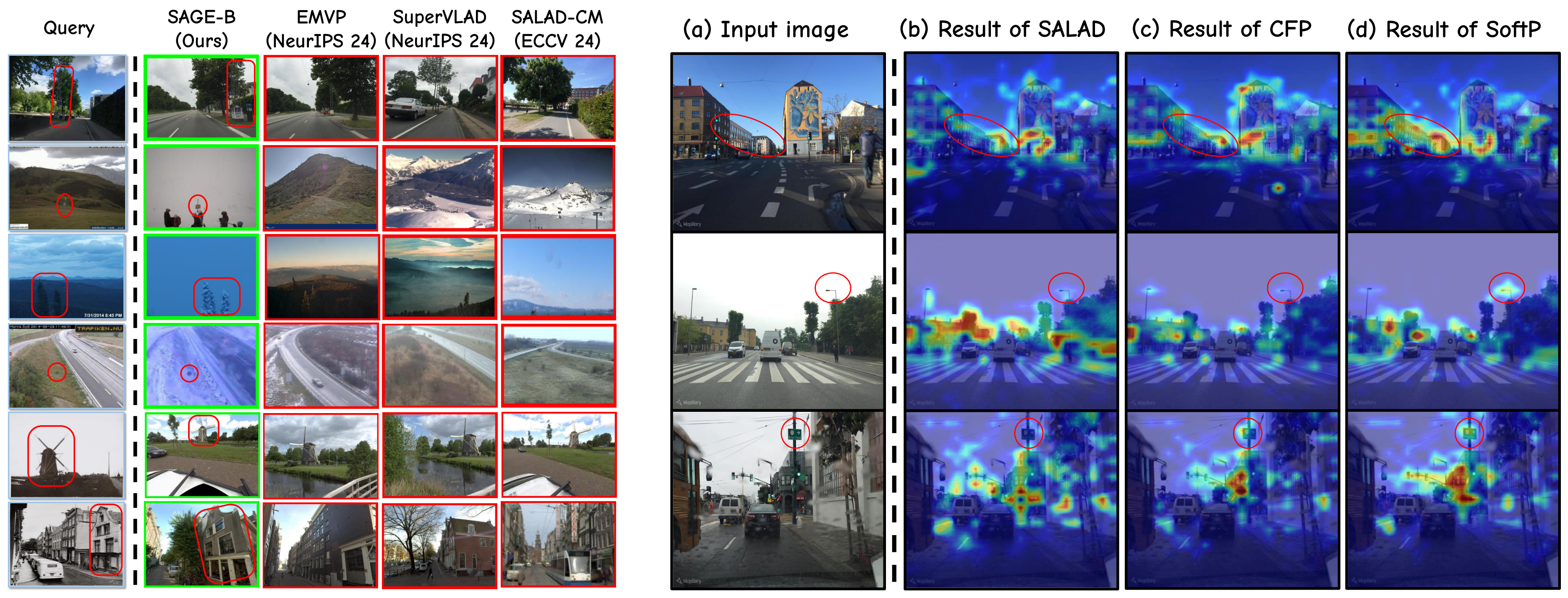
SAGE addresses the limits of static sampling policies in VPR. During training, it continuously reconstructs an online geo-visual graph so that sample mining follows the model's evolving embedding space. A greedy weighted clique expansion sampler mines informative spatial-visual neighborhoods, while Soft Probing amplifies discriminative local patches before aggregation.
Training neighborhoods are refreshed online instead of being fixed before optimization.
A greedy weighted clique expansion sampler focuses training on challenging geo-visual neighborhoods.
A lightweight residual weighting module boosts discriminative local patches before aggregation.
The released model keeps the DINOv2 backbone frozen and trains a compact set of adaptation parameters.
SAGE repeatedly rebuilds a spatial-visual graph during training to track the current descriptor geometry.
Hard and informative neighborhoods are selected with a greedy weighted clique expansion strategy.
SoftP and parameter-efficient fine-tuning strengthen local evidence without updating the full backbone.
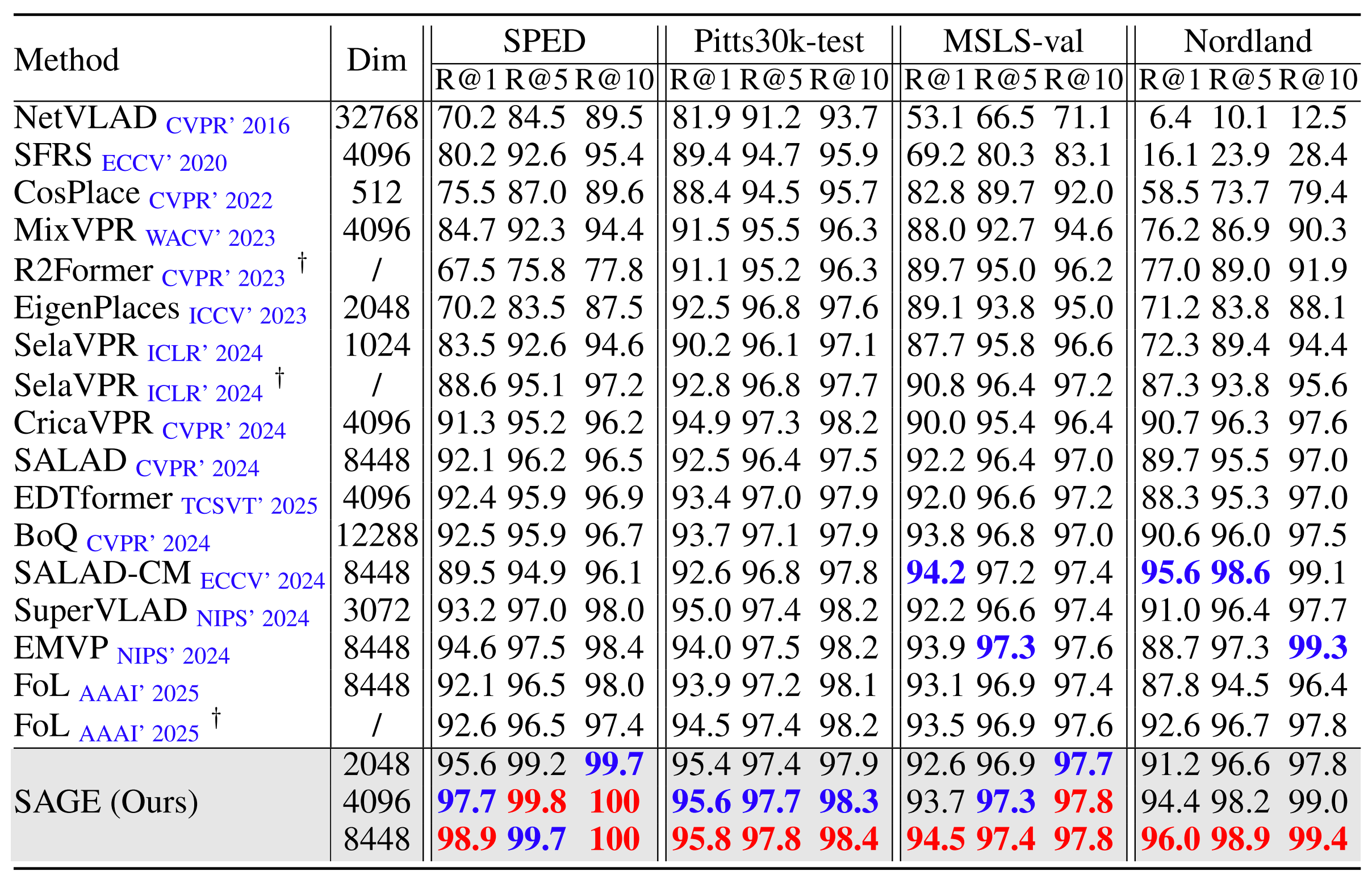
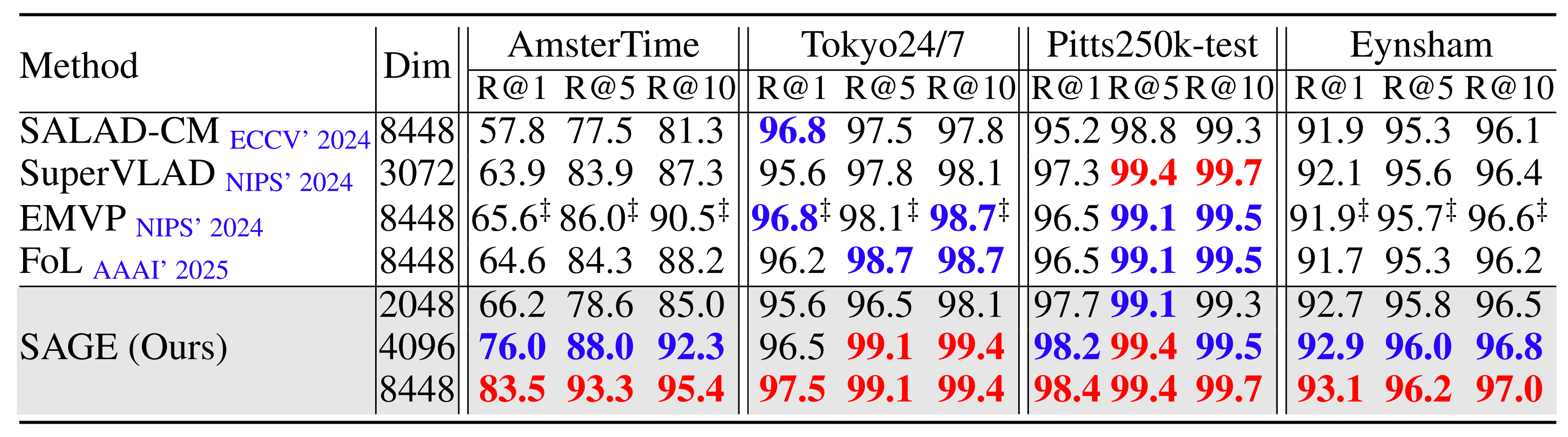
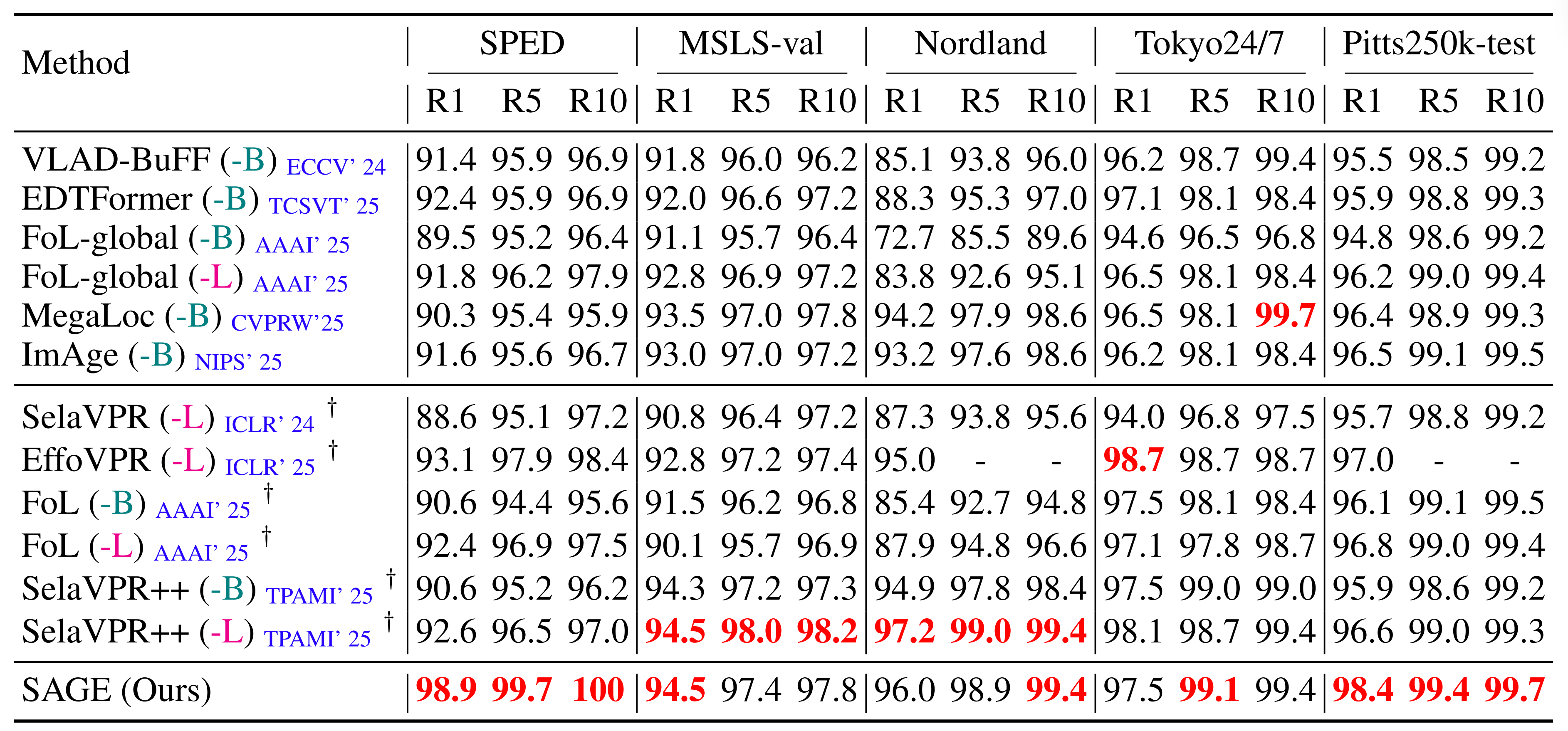
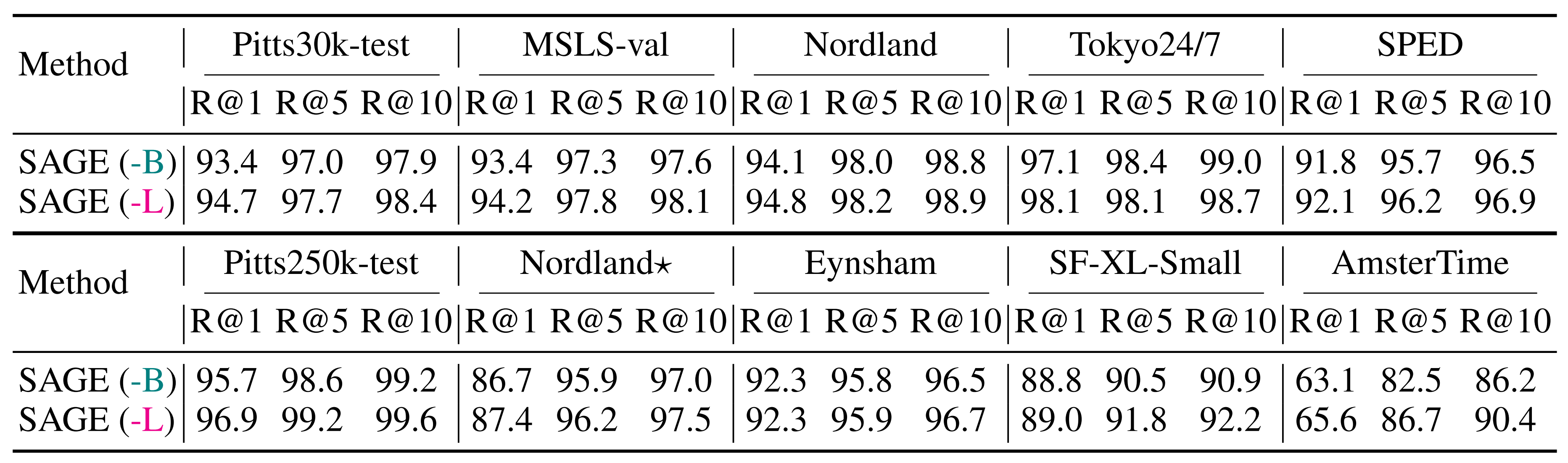
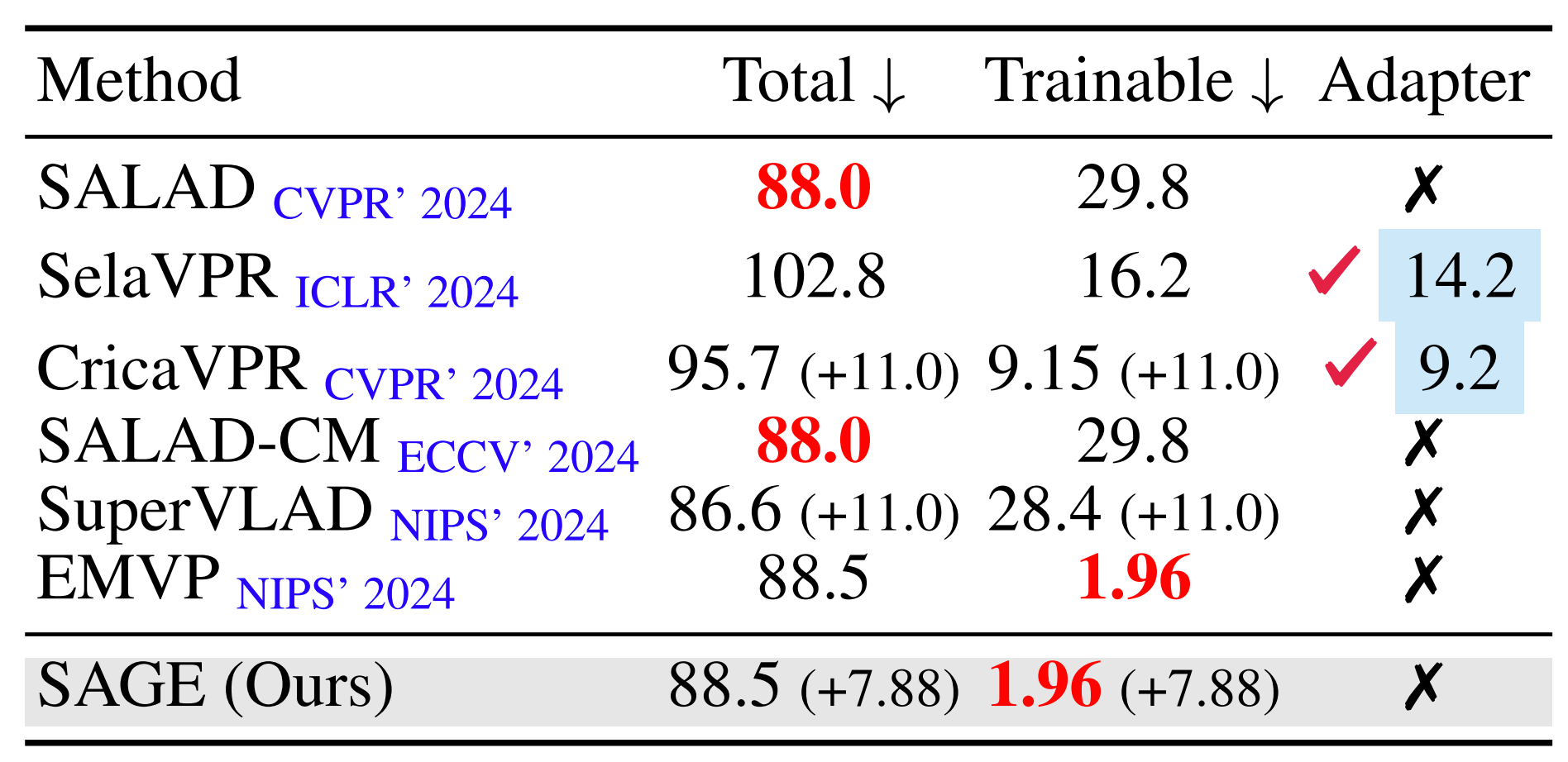
SAGE is evaluated across VPR benchmarks with multiple descriptor dimensions and model variants. The screenshots below summarize the main comparison, extended benchmark coverage, and parameter-efficiency analysis.
For questions, contact: shunpengchen@bupt.edu.cn
@inproceedings{SAGE,
title={SAGE: Spatial-visual Adaptive Graph Exploration for Efficient Visual Place Recognition},
author={Shunpeng Chen and Changwei Wang and Rongtao Xu and Xingtian Pei and Yukun Song and Jinzhou Lin and Wenhao Xu and Jingyi Zhang and Li Guo and Shibiao Xu},
booktitle={The Fourteenth International Conference on Learning Representations},
year={2026},
url={https://openreview.net/forum?id=DCpbEXqPvS}
}